Распознанный текст, спецсимволы и формулы могут содержать ошибки, поэтому с корректным вариантом рекомендуем ознакомиться на отсканированных изображениях учебника выше Также, советуем воспользоваться поиском по сайту, мы уверены, что вы сможете найти больше информации по нужной Вам тематике ДЛЯ СТУДЕНТОВ И ШКОЛЬНИКОВ ЕСТЬ
ZADANIA.TO
3.3. Многомерные оптимальные системыВначале подытожим основные результаты, полученные при решении задачи синтеза одномерной оптимальной реализуемой системы управления.
Пусть входное воздействие g(t)
представляется реализацией случайного процесса с энергетическим спектром где Р.Калман
предложил другое представление того же решения в виде дифференциального
уравнения При этом входное воздействие g(t)
удобно представить в виде выходного сигнала фильтра (рис.38), описываемого
дифференциальным уравнением Фильтр, с помощью которого моделируется входное воздействие g(t), обычно называют формирующим фильтром. Само же входное воздействие g(t) при этом является состоянием формирующей системы. Было установлено, что при описании
входных сигналов в виде состояния некоторой системы всегда получается решение в
виде точно такой же по виду системы с обратной связью. При этом структура САУ
сохраняется для любого интервала времени, в том числе и во время переходного
процесса, при изменении коэффициентов В этом разделе вначале рассматриваются математические модели входных многомерных нестационарных воздействий. После этого обсуждается структура оптимальной многомерной системы, которая называется фильтром Калмана.
Описание входных воздействий
Пусть нам необходимо осуществлять
управление одновременно n выходными сигналами системы
где A(t) – (n V(t) - (n Рассмотрим примеры. Пример 1. Уравнение состояния для трех независимых параметров. Предположим, что необходимо обеспечить измерение траектории по 3 координатам, не связанным друг с другом. Эти координаты описываются случайными процессами, соответствующими дифференциальным уравнениям:
Введем вектор Пример 2. Входное воздействие с дробно-рациональным энергетическим спектром. Пусть g(t) описывается дифференциальным уравнением вида:
Найдем энергетический спектр такого
воздействия. Для этого вначале выполним преобразование Лапласа
Энергетический спектр входного воздействия находится
по формуле
Введем теперь вектор Пример 3. Полиномиальное воздействие. Пусть Введем вспомогательные переменные
или в стандартной форме:
где Таким образом, исходное дифференциальное
уравнение состояния Пусть теперь
Рассмотренная векторная модель позволяет дать математическое описание различных ситуаций, возникающих при формировании входных сигналов проектируемых САУ. Пример 4.
Предположим, что один и тот же входной сигнал g(t)
передается по двум независимым каналам связи. При этом на выходе первого канала
наблюдается смесь Пример 5.
Пусть входной сигнал
Многомерный фильтр Калмана
Наблюдаемый многомерный сигнал
Структура оптимальной системы описывается следующим уравнением:
где а Итак, и в многомерном нестационарном
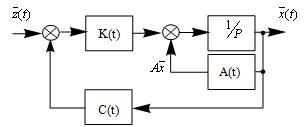
случае система управления сохраняет свою структуру (рис. 39). По-прежнему это
система, в которой формируется сигнал ошибки
Рис. 39 При этом часть системы в точности соответствует формирующему фильтру. Пример 6. Еще раз рассмотрим систему управления при входном сигнале, заданном уравнением:
где В этом случае уравнение Калмана для наблюдений z(t)=g(t)+n(t) запишется в виде:
где K(t)=V(t)
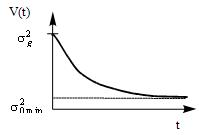
Существенной особенностью записанного уравнения фильтрации является зависимость коэффициента усиления K(t) от времени. Это связано с тем, что фильтр Калмана учитывает переходный процесс в системе и оптимален для каждого момента времени t. Характерную зависимость V(t) можно проиллюстрировать графиком на рис. 40.
Рис. 40 В начальный момент времени (t=0) рассогласование
между выходным сигналом x(t=0)=0 системы управления и заданной траекторией
движения g(t=0)=g(0) может быть большим. Поэтому и коэффициент усиления
К(t=0)= Итак, для одномерного случая отличием приведенного решения является учет переходного процесса и выбор оптимальных параметров системы управления в каждый момент времени. Оптимальное управление предполагает точное знание моделей входных воздействий и характеристик помех. Однако на практике численные значения параметров моделей известны не точно. Кроме того, вычислительные трудности ограничивают применение сложных моделей высокой размерности, предопределяя применение более грубых и более простых приближений к реальным процессам. Указанные причины приводят к отклонению действительных характеристик эффективности от расчетных. Величина отклонений действительных характеристик систем управления от потенциальных за счет изменения параметров внешних воздействий называется чувствительностью системы управления. Предположим, что Q – некоторый
показатель качества, например, средний квадрат ошибки системы, зависящий от
некоторого параметра В этом разделе рассмотрены два подхода к построению оптимальных систем управления. Первый подход связан с именем Н. Винера и основан на нахождении структуры оптимальной системы с помощью решения интегрального уравнения. Главные недостатки этого метода – сложность решения задач синтеза САУ и требования к стационарности входных воздействий. Поэтому при проектировании современных нестационарных систем управления применяется метод пространства состояний, предложенный Р. Калманом. Этот метод позволяет на инженерном уровне решать сложные задачи построения оптимальных многомерных систем с учетом переходных процессов в условиях нестационарных помех и нестационарных воздействий.
|
 |
Оглавление
|
 ,
,
 . Будем описывать
входные воздействия с помощью системы линейных дифференциальных уравнений
состояния:
. Будем описывать
входные воздействия с помощью системы линейных дифференциальных уравнений
состояния:
 ;
;  – векторный белый шум с
энергетическим спектром каждой компоненты
– векторный белый шум с
энергетическим спектром каждой компоненты  .
.
 , матрицу
, матрицу  и белый шум
и белый шум  . Тогда одновекторное
уравнение состояния
. Тогда одновекторное
уравнение состояния  .
.
 и тогда
и тогда  , где
, где  . Таким образом
дифференциальное уравнение третьего порядка удается преобразовать к стандартной
векторной форме. Очевидно, что точно так же к векторному уравнению первого
порядка можно преобразовать дифференциальное уравнение произвольного порядка.
. Таким образом
дифференциальное уравнение третьего порядка удается преобразовать к стандартной
векторной форме. Очевидно, что точно так же к векторному уравнению первого
порядка можно преобразовать дифференциальное уравнение произвольного порядка.
 ,
,  .
.
 , C(t)=
, C(t)= ;
;
 – помеха в виде векторного белого шума со
спектральными плотностями каждой компоненты
– помеха в виде векторного белого шума со
спектральными плотностями каждой компоненты  . В этом случае одно векторное
уравнение
. В этом случае одно векторное
уравнение  описывает
двухканальную систему наблюдений скалярного процесса
описывает
двухканальную систему наблюдений скалярного процесса  . Производятся наблюдения
сигнала
. Производятся наблюдения
сигнала  ,
,
 совпадает с
известной величиной дисперсии ошибки стационарного реализуемого фильтра Винера.
совпадает с
известной величиной дисперсии ошибки стационарного реализуемого фильтра Винера.