Распознанный текст, спецсимволы и формулы могут содержать ошибки, поэтому с корректным вариантом рекомендуем ознакомиться на отсканированных изображениях учебника выше Также, советуем воспользоваться поиском по сайту, мы уверены, что вы сможете найти больше информации по нужной Вам тематике ДЛЯ СТУДЕНТОВ И ШКОЛЬНИКОВ ЕСТЬ
ZADANIA.TO
3.2. Оптимальные реализуемые системы управления. Фильтр КалманаКак уже отмечалось, наряду с принципиальной возможностью синтеза оптимальной системы управления, метод Н. Винера обладает существенными недостатками. Главные из этих недостатков – нереализуемость фильтра, требование стационарности входных воздействий и трудности решения интегрального уравнения Винера-Хопфа в общем случае. В этом разделе вначале будет предпринята попытка извлечь все то полезное, что имеется в подходе Н. Винера. Это, прежде всего, возможность определить минимально достижимую дисперсию ошибки управления, а также построение фильтров для некоторых конкретных примеров. Затем анализируются возможности получения физически реализуемых систем на основе решения уравнения Н. Винера. Важным шагом будет представление входных сигналов и реализуемой системы управления в форме стохастических дифференциальных уравнений. В заключение рассматривается обобщение полученных результатов на случай нестационарных воздействий на конечном интервале времени.
Потенциальная эффективность нереализуемых систем управления
Важным достоинством уравнений Н. Винера
является возможность довольно простого нахождения дисперсии ошибки оптимальной
системы управления, т.е. минимально достижимой дисперсии ошибки для всех
возможных систем при заданных характеристиках сигналов и помех. Это позволяет
сравнивать дисперсию ошибки реальной системы с полученным граничным значением и
тем самым оценивать реальную эффективность конкретных систем в виде величины
проигрыша Минимальную дисперсию ошибки можно найти с помощью подстановки в формулу (см. п. 3.1)
импульсной переходной характеристики Преобразуем формулу для дисперсии ошибки:
Полученное выражение значительно
упрощается для случая, когда помеха может быть представлена белым шумом с корреляционной
функцией
или
и, после подстановки
Пример 1. Пусть
Таким образом, в рассмотренном примере
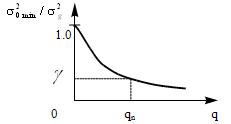
Построим зависимость
Рис. 34 Задавая требуемое значение дисперсии
ошибки с помощью найденной зависимости, можно определить пороговое отношение
сигнал/помеха
Физически реализуемые системы. Фильтр Винера
Обратимся к уже рассмотренному примеру,
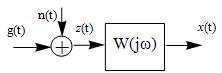
в котором импульсная переходная характеристика При выводе уравнения Н.Винера это обстоятельство не учитывалось. Именно поэтому решение задачи построения оптимальной системы и приводит к физически нереализуемым устройствам. Тем не менее, можно произвести модификацию уравнения Н.Винера и получить на его основе физически реализуемые системы. Это осуществляется следующим образом. Представим синтезируемую систему в виде рис. 35.
Рис. 35 Система получается физически
нереализуемой. Однако, если бы входное воздействие
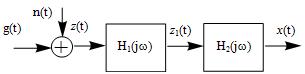
Рис. 36 После этого с помощью уравнения Винера найдем передаточную функцию H2(jw) и выделим ее реализуемую часть H2P(jw). Общая передаточная функция оптимальной реализуемой системы запишется в виде: W(jw)=H1(jw) H2P(jw). Каким же образом превратить z(t)
в белый шум с помощью фильтра? Нам известен энергетический спектр Gz(w)=Gg(w)+Gn(w).
Необходимо, чтобы
Для этого необходимо выбрать фильтр с
передаточной функцией Тогда передаточная функция оптимального
реализуемого фильтра записывается в виде Пример 2.
Пусть Разложим
= Таким образом,
где
Точно так же, как и раньше, может быть найдена минимально достижимая дисперсия ошибки реализуемой системы: Заметим, что найденная дисперсия ошибки Таким образом, подход Винера хотя и с дополнительными усложнениями, но все-таки дает возможность построения физически реализуемой системы управления и определения ее точностных характеристик для стационарных входных воздействий и бесконечного времени наблюдения. Фильтр Калмана для стационарных процессов
Полученное в последнем примере решение
задачи синтеза оптимальной реализуемой системы дает возможность определить
импульсную переходную характеристику Рассмотрим вначале возможности описания оптимальной системы, с помощью дифференциального уравнения. Как было установлено, передаточная функция оптимальной реализуемой системы управления записывается в виде:
где
После несложных преобразований:
получим следующее дифференциальное уравнение, описывающее оптимальную систему:
где
Рис. 37 Эта структурная схема и является решением Калмана
рассматриваемой задачи. Оказывается, процедуру оптимального управления можно
представить в виде системы с обратной связью. Очень важно, что структура не
изменяется и остается оптимальной, если изменяются параметры сигналов и помех,
а также на этапе переходного процесса. В этих случаях оптимальная система (рис.
37) становится системой с переменными параметрами k=k(t) и Р. Калман обратил также внимание, что
часть системы управления полностью определяется видом входного сигнала. Действительно,
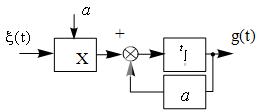
если спектр входного воздействия Найдем величину С другой стороны, рассмотренное дифференциальное уравнение можно представить как уравнение, описывающее систему с обратной связью, показанную на рис. 38.
Рис. 38 Сравним структурные схемы оптимальной САУ (рис. 37) и полученной системы (рис.38), формирующей входной сигнал g(t) . Анализ структурных схем и связанных с ними дифференциальных уравнений показывает полное соответствие формирующего фильтра и значительной части структуры оптимальной САУ.
* * *
Таким образом, Р.Калман предложил другое представление для решения задачи построения оптимальной системы управления, данной Н.Винером. Но это представление решения в виде замкнутой системы, близкой по виду к формирующему фильтру, имело далеко идущие последствия. Было установлено, что структура системы управления не изменяется и при управлении одновременно несколькими параметрами, а также при нестационарных воздействиях. Эта структура сохраняется и остается оптимальной для широкого класса возможных входных сигналов и помех.
|
 |
Оглавление
|
 .
.
 .
.
 .
.

 .
.
 нереализуемой
системы управления (см. пример 1).
нереализуемой
системы управления (см. пример 1).
 Такую систему можно представить с
помощью структурной схемы на рис.37, где K=VN0-1 .
Такую систему можно представить с
помощью структурной схемы на рис.37, где K=VN0-1 .