3.1. Обнаружение сигналов при известных параметрах помех
Рассмотрим сначала наиболее простую задачу теории
обнаружения сигналов. Допустим, что некоторый объект, интересующий наблюдателя,
может находиться в одном из двух состояний  или
или  . Такими состояниями могут быть, например,
наличие или отсутствие цели в зоне действия РЛС, передача сигнала «0» или «1»
по каналу связи, работоспособность или отказ устройства и др. В каждом
конкретном эксперименте объект находится в состоянии или в состоянии с вероятностями
. Такими состояниями могут быть, например,
наличие или отсутствие цели в зоне действия РЛС, передача сигнала «0» или «1»
по каналу связи, работоспособность или отказ устройства и др. В каждом
конкретном эксперименте объект находится в состоянии или в состоянии с вероятностями  и
и  соответственно. В зависимости от
состояния или
объекта
результаты
соответственно. В зависимости от
состояния или
объекта
результаты  эксперимента
имеют плотность распределения вероятностей (ПРВ)
эксперимента
имеют плотность распределения вероятностей (ПРВ)  или ПРВ
или ПРВ  . На основе анализа наблюдений
. На основе анализа наблюдений  необходимо определить,
в каком именно состоянии находится объект.
необходимо определить,
в каком именно состоянии находится объект.
Поскольку действительное состояние объекта наблюдателю не
известно, то можно лишь выдвинуть предположение (гипотезу)  о том, что объект
находится в состоянии и альтернативное предположение
о том, что объект
находится в состоянии и альтернативное предположение  . В этих терминах задача
состоит в том, чтобы на основе наблюдении
. В этих терминах задача
состоит в том, чтобы на основе наблюдении  проверить справедливость гипотезы . Любое правило проверки
гипотезы каждому конкретному результату эксперимента должно поставить в соответствие
определенное решение. Но это означает, что при заданном правиле решения
среди всех возможных исходов
проверить справедливость гипотезы . Любое правило проверки
гипотезы каждому конкретному результату эксперимента должно поставить в соответствие
определенное решение. Но это означает, что при заданном правиле решения
среди всех возможных исходов  опытов можно выделить область
опытов можно выделить область  , где принимается
гипотеза .
Если же наблюдения
, где принимается
гипотеза .
Если же наблюдения  ,
то принимается решение .
,
то принимается решение .
Так, например, если производится только одно наблюдение  на отрезке
на отрезке  , то для конкретного
значения должно
быть принято либо решение , либо . Таким образом, множество
, то для конкретного
значения должно
быть принято либо решение , либо . Таким образом, множество  всех точек отрезка
(всех возможных исходов эксперимента) разбивается на две области и
всех точек отрезка
(всех возможных исходов эксперимента) разбивается на две области и  (рис.3.1,а).
(рис.3.1,а).
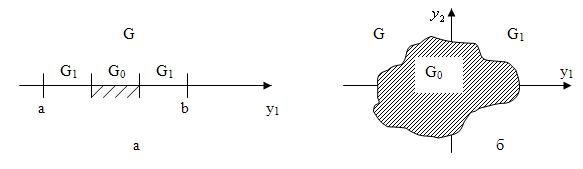
Рис. 3.1. Допустимая и критическая области
Если  , то принимается решение о справедливости
гипотезы ;
если же
, то принимается решение о справедливости
гипотезы ;
если же  ,
то предпочтение отдается гипотезе . Когда производится два наблюдения
,
то предпочтение отдается гипотезе . Когда производится два наблюдения  , множество всех исходов
эксперимента представляется точками плоскости
, множество всех исходов
эксперимента представляется точками плоскости  (рис.3.1,б). Поскольку каждому исходу
(рис.3.1,б). Поскольку каждому исходу
 соответствует
конкретное решение или
, то все
множество так
же, как и в одномерном случае, должно быть разделено на два подмножества и (рис.3.1,б).
соответствует
конкретное решение или
, то все
множество так
же, как и в одномерном случае, должно быть разделено на два подмножества и (рис.3.1,б).
Очевидно, в общем случае выборки  произвольного объема
произвольного объема  -мерная область всех возможных исходов
опытов разбивается на две подобласти и . Область , где принимается гипотеза , называют допустимой
областью. Вторую область , отклонения гипотезы , называют критической.
-мерная область всех возможных исходов
опытов разбивается на две подобласти и . Область , где принимается гипотеза , называют допустимой
областью. Вторую область , отклонения гипотезы , называют критической.
Таким образом, построение оптимального правила проверки
гипотезы может
трактоваться как нахождение наилучшего разбиения пространства всех возможных результатов
эксперимента на две области и или, что в данном случае
то же самое, как выбор наилучшей допустимой области.
Для того чтобы выяснить, что следует понимать под наилучшим
разбиением, необходимо ввести критерий качества правила принятия решения.
Поскольку состояние объекта заранее не известно, а прием сигналов затруднен
помехами, то при использовании любого правила решения возможны
ошибки. С этой точки зрения после принятия решения возможны четыре ситуации,
схематично изображенные на рис.3.2. Две из них соответствуют правильным
решениям (сплошные линии) и две – ошибочным (пунктир). Ошибка, в результате
которой принимается решение при нахождении объекта в состоянии , называется ошибкой
первого рода. Другая ошибка – ошибкой второго рода.
В задачах обнаружения сигнала состояние и гипотеза соответствуют отсутствию цели, и
ошибка первого рода обычно называется ложной тревогой. Ошибка второго рода
состоит в принятии неверного решения об отсутствии цели, когда цель
присутствует, и называется пропуском цели.
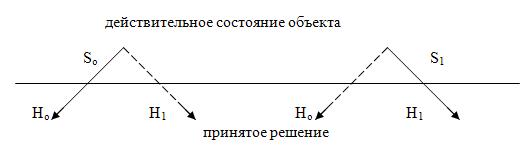
Рис. 3.2. Правильные (сплошные линии) и ложные (пунктир)
решения
Используя формулу (1.32), нетрудно записать следующие
выражения для вероятности ложной тревоги:
 (3.1)
(3.1)
и вероятности пропуска цели:
 , (3.2)
, (3.2)
где  .
Вместо
.
Вместо  чаще
используется вероятность противоположного события, т.е. вероятность
чаще
используется вероятность противоположного события, т.е. вероятность  правильного обнаружения
(вероятность верного решения о наличии цели). Очевидно,
правильного обнаружения
(вероятность верного решения о наличии цели). Очевидно,
 . (3.3)
. (3.3)
Для заданного размера выборки невозможно одновременно сделать сколь
угодно малыми вероятности ошибок первого и второго рода. Например, чтобы
уменьшить вероятность ложной тревоги  , следует уменьшить размер критической
области , но
тогда увеличивается размер допустимой области и возрастает вероятность ошибки второго
рода (3.2). Поэтому «разумный» критерий оптимальности должен быть построен на
основе какого-либо компромисса между вкладом двух типов возможных ошибок в
общую характеристику или общие показатели системы обнаружения.
, следует уменьшить размер критической
области , но
тогда увеличивается размер допустимой области и возрастает вероятность ошибки второго
рода (3.2). Поэтому «разумный» критерий оптимальности должен быть построен на
основе какого-либо компромисса между вкладом двух типов возможных ошибок в
общую характеристику или общие показатели системы обнаружения.
