Распознанный текст, спецсимволы и формулы могут содержать ошибки, поэтому с корректным вариантом рекомендуем ознакомиться на отсканированных изображениях учебника выше Также, советуем воспользоваться поиском по сайту, мы уверены, что вы сможете найти больше информации по нужной Вам тематике ДЛЯ СТУДЕНТОВ И ШКОЛЬНИКОВ ЕСТЬ
ZADANIA.TO
4.3. Действие помех на цифровые системы управленияРассмотрим особенности анализа цифровых систем управления, находящихся под воздействием помех. Вначале приведем основные формулы, позволяющие определить дисперсию ошибки сопровождения, обусловленную действием помех. Затем кратко проанализируем методы построения оптимальных линейных дискретных систем, которые в настоящее время широко используются при проектировании и анализе цифровых систем управления.
Дисперсия ошибки в цифровых системах управления
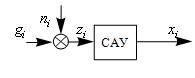
Цифровую систему управления с учетом действия помех можно представить в виде рис. 50.
Рис. 50 На вход системы действует сумма Поскольку система управления линейна, то можно отдельно рассматривать прохождение сигналов и помех через эту систему. Таким образом, достаточно найти дисперсию процесса, описываемого следующим уравнением общего вида:
Помехой в системе управления обычно
служат независимые отсчеты Ni гауссовских случайных величин с
нулевым средним и дисперсией Пример. Система первого порядка. Пусть система управления описывается простейшим
разностным уравнением вида Найдем дисперсию ошибки на выходе такой
системы. Для этого возведем левую и правую части в квадрат и найдем математическое
ожидание. После возведения в квадрат получаем Теперь находим математическое ожидание
левой и правой частей: Таким образом, дисперсия ошибки за счет
действия помех
Оптимальные цифровые системы. Описания динамики движения объектов в цифровых системах
В непрерывных системах для описания
динамики движения объекта или входного сигнала системы управления используется
следующее стохастическое дифференциальное уравнение: В цифровых системах дифференциальному
уравнению первого порядка будет соответствовать разностное уравнение Другим параметром, описывающим движение
объекта, является характеристика скорости изменения траектории. В рассматриваемом
случае мерой этой скорости может быть коэффициент корреляции двух соседних
значений g(ti–1) =gi–1 и g(ti) = gi траектории.
Для его нахождения умножим левую и правую части уравнения на gi–1
и найдем их средние значения: Нормированная корреляционная функция
последовательности Допустим, что с помощью приведенного
уравнения мы хотим описать траекторию движения объекта, значительно изменяющегося
за 100 тактовых интервалов. Это означает, что
Оптимальная цифровая линейная система управления
Пусть на вход линейной системы управления
действует сумма zi =gi + ni
управляющего сигнала gi , который описывается
уравнением Состояние цифровой линейной системы
управления xi связано с входным сигналом следующим
разностным уравнением Основной задачей системы является
минимизация дисперсии ошибки Итак, необходимо найти
Величины gi–1 имеют
большие значения. Если необходимо минимизировать ошибки, то нужно положить В этой формуле отражены три составляющие
ошибки системы управления. Первое слагаемое учитывает ошибку
где Продифференцируем Di по bi
и
приравняем производную к нулю. Легко подсчитать, что минимальное значение Pi
= Di min дисперсии ошибки достигается при
где В этом уравнении величина Таким образом, в найденной системе
управления вначале формируется прогноз Весовым коэффициентом
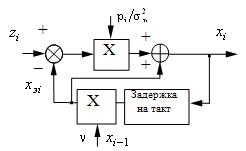
Рис. 51 Структурная схема рассмотренной оптимальной цифровой системы управления может быть представлена в виде рис.51.
* * *
Рассмотренные вопросы действия помех на цифровые системы управления позволяют решить две важные задачи. Во–первых, для любой заданной линейной системы управления можно дать оценку ее эффективности, т.е. оценить дисперсию ошибки за счет действия помех. Вторая важная задача – построение оптимальной цифровой системы управления, учитывающей как динамику движения объекта, так и величину помехи, действующей на систему управления.
|
 |
Оглавление
|
 . Таким образом,
параметр
. Таким образом,
параметр