Распознанный текст, спецсимволы и формулы могут содержать ошибки, поэтому с корректным вариантом рекомендуем ознакомиться на отсканированных изображениях учебника выше Также, советуем воспользоваться поиском по сайту, мы уверены, что вы сможете найти больше информации по нужной Вам тематике ДЛЯ СТУДЕНТОВ И ШКОЛЬНИКОВ ЕСТЬ
ZADANIA.TO
1.2. Линейные системы управленияВ этом разделе рассматривается важнейший класс систем управления – линейные системы. Центральное место, которое занимают линейные системы в теории управления, обусловлено тремя основными причинами. Во-первых, многие реальные системы управления хорошо описываются линейными моделями. Во-вторых, именно для линейных систем разработаны сравнительно простые математические методы анализа. Основой для исследования нелинейных систем управления служит математический аппарат теории линейных систем.
Вначале обсуждается классификация систем управления и выделяется класс линейных систем. Затем рассматриваются основные математические методы анализа линейных систем.
Классификация систем управления
Основным типом являются замкнутые системы управления, которые можно представить в виде структурной схемы, приведенной на рис. 5. Система управления содержит управляющую
подсистему или объект управления (ОУ), устройство управления (УУ) и схему
сравнения входного сигнала Математическая модель любой из систем
управления включает в себя описание входных и выходных сигналов и вид преобразования
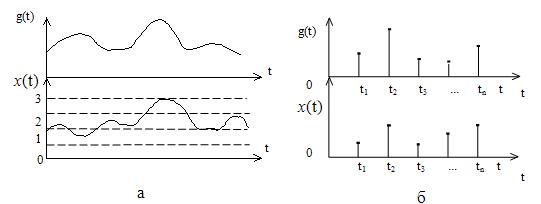
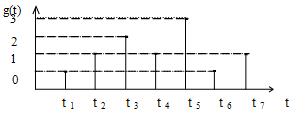
входных сигналов Остановимся вначале на классификации систем управления по виду входных и выходных сигналов. Системы управления, имеющие один вход и один выход, называют одномерными. Системы, имеющие несколько входов или выходов, называют многомерными. Системы управления называют непрерывными, если входные и выходные сигналы имеют непрерывное множество значений по времени. Если сигналы поступают в дискретные моменты времени, то такие системы называют дискретными или импульсными. Дискретные системы управления с конечным числом уровней сигналов называют цифровыми. Представим реализации сигналов систем различных типов в виде графиков. На рис. 8,а изображен характерный вид сигнала в непрерывной системе. На рис. 8,б представлен характерный вид сигнала в дискретной или импульсной системе. На рис. 9 – в цифровой. Заметим, что все системы, построенные на базе ЭВМ, являются цифровыми.
Рис. 8.
Рис. 9. Теперь остановимся на классификации
систем управления, основанной на свойствах оператора Систему называют стационарной,
если вид и свойства оператора Системы управления называют линейными, если выполняются принцип суперпозиции. Если этот принцип несправедлив, то систему называют нелинейной. Сущность принципа суперпозиции
заключается в том, что линейной комбинации произвольных входных сигналов Принцип суперпозиции всегда выполняется, если выполняются следующие два условия: 1) при суммировании любых двух входных сигналов соответствующие выходные сигналы суммируются; 2) при любом увеличении (уменьшении) входного сигнала без изменения его формы выходной сигнал увеличивается (уменьшается) во столько же раз, также не изменяя своей формы.
Оператор
Математическое описание линейных систем управления
Существует два основных, тесно связанных
между собой, метода анализа линейных систем. Это анализ систем во временной
области и анализ систем в частотной области. Рассмотрим вначале метод анализа
систем во временной области. Для этого вспомним определение и свойства
импульсной
Введем функцию
Эта формула называется интегралом
Дюамеля или интегралом свертки. Ее смысл заключается в
том, что выходной сигнал любой линейной системы получается с помощью
взвешивания и последующего интегрирования входного сигнала Наиболее прост анализ линейных систем
управления в частотной области. Действительно, обозначим преобразование Лапласа
от
Если в этом равенстве положить Функция
Итак, если известна передаточная функция
Очень широкий класс линейных систем управления описывается с помощью линейных дифференциальных уравнений:
Преобразуем левую и правую часть этого уравнения по Лапласу и получим следующее выражение
или Таким образом, при заданном описании системы в виде дифференциального уравнения передаточная функция находится очень просто и, следовательно, легко осуществляется анализ линейных систем.
Типовые звенья систем управления
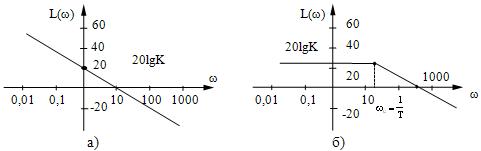
Рассмотрим примеры построения частотных характеристик трех звеньев, которые встречаются во многих системах автоматического управления. 1. Интегрирующее звено Предположим, что выходной сигнал звена системы управления определяется как интеграл
от входного сигнала
Таким образом, передаточная функция
интегрирующего звена запишется в виде
Рис. 10. При этом отрезок оси абсцисс, длина
которого соответствует десятикратному изменению частоты 2. Апериодическое звено Апериодическим называют звено, описываемое следующим дифференциальным уравнением
где
Для апериодического звена АЧХ
где Такая ЛАХ может быть приближенно
представлена ломаной линией, показанной на рис. 10, б. Эта приближенная
характеристика составлена из двух асимптот, к которым стремится ЛАХ при 3. Дифференцирующее звено Связь между выходным и входным сигналами идеального дифференцирующего звена определяется соотношением
Легко убедиться, что
передаточная функция Примером близкого к
идеальному дифференцирующего звена является тахогенератор (датчик частоты
вращения вала), выходное напряжение которого
Передаточные функции систем управления с обратной связью
Предположим, что некоторая линейная
система состоит из двух последовательно соединенных подсистем, имеющих передаточные
функции Очевидно,
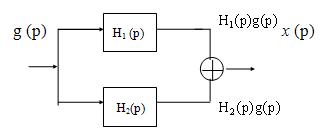
Рис. 11. При параллельном соединении систем (рис.
12) их передаточные функции складываются:
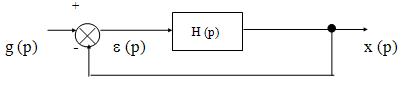
Рис. 12. Рассмотрим теперь систему с обратной связью (рис. 13). Передаточная функция
Рис. 13. Передаточная функция Пример 1. Реальный исполнительный двигатель обладает инерционностью и поэтому описывается следующим дифференциальным уравнением
При малой постоянной времени двигателя
т. е. реальный двигатель может быть представлен в
виде последовательного соединения двух звеньев – интегрирующего с передаточной
функцией Пример 2.
Предположим, что осуществлено параллельное соединение (рис. 12) интегрирующего
звена с передаточной функцией
соответствует последовательному соединению
интегрирующего звена и так называемого форсирующего звена с передаточной
функцией Пример 3.
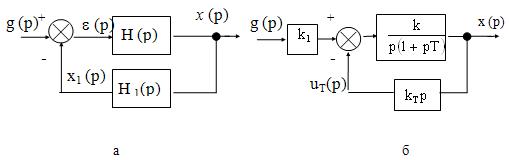
Рассмотрим более сложную систему, в цепь обратной связи которой включено звено
с передаточной функцией
Рис. 14. Для определения передаточной функции
замкнутой системы запишем где - передаточная функция замкнутой системы управления,
представленной на рис. 14, а. Важным примером может служить система,
показанная на рис. 14, б. Этой системе соответствует, например,
последовательное соединение усилителя с коэффициентом усиления
где
|
 |
Оглавление
|
 .
.
 ,
,
 и
и 

 ,
,