Распознанный текст, спецсимволы и формулы могут содержать ошибки, поэтому с корректным вариантом рекомендуем ознакомиться на отсканированных изображениях учебника выше
Также, советуем воспользоваться поиском по сайту, мы уверены, что вы сможете найти больше информации по нужной Вам тематике
2.4. Рекуррентное оценивание изменяющихся параметров сигналов
В предыдущих разделах решались задачи
оценивания параметра  ,
не изменяющегося в течение наблюдений. Однако во многих случаях нельзя
пренебречь изменением этого параметра. К ним относятся, например, задачи
построения следящих систем в радиолокации, радионавигации [18.19] и радиосвязи
[17,18]. В таких системах время наблюдения, как правило, велико, и основной
целью анализа последовательности отсчётов
,
не изменяющегося в течение наблюдений. Однако во многих случаях нельзя
пренебречь изменением этого параметра. К ним относятся, например, задачи
построения следящих систем в радиолокации, радионавигации [18.19] и радиосвязи
[17,18]. В таких системах время наблюдения, как правило, велико, и основной
целью анализа последовательности отсчётов  является оценка каких-либо изменяющихся
параметров движения объектов или параметров помех, необходимая
для обеспечения надежного функционирования системы. При этом с каждым
очередным наблюдением
является оценка каких-либо изменяющихся
параметров движения объектов или параметров помех, необходимая
для обеспечения надежного функционирования системы. При этом с каждым
очередным наблюдением  связывается
новое значение параметра
связывается
новое значение параметра  , т.е. наблюдения рассматриваются как
функции
, т.е. наблюдения рассматриваются как
функции  изменяющихся
информационных параметров и помех
изменяющихся
информационных параметров и помех  . В дальнейшем изложении в основном
будет рассматриваться случай аддитивного взаимодействия
. В дальнейшем изложении в основном
будет рассматриваться случай аддитивного взаимодействия  скалярных или векторных
параметров и гауссовских некоррелированных помех.
скалярных или векторных
параметров и гауссовских некоррелированных помех.
В подобных задачах принципиальное значение имеет описание
процесса изменения параметра в дискретном времени. Правильный выбор
модели СП  ,
сочетающий простоту математического представления и адекватность реальным
физическим явлениям, зачастую представляет довольно сложную проблему
и всегда требует тщательного анализа [7,20-22].
,
сочетающий простоту математического представления и адекватность реальным
физическим явлениям, зачастую представляет довольно сложную проблему
и всегда требует тщательного анализа [7,20-22].
При решении ряда прикладных задач для описания
последовательности ,
используются линейные комбинации
 (2.30)
(2.30)
детерминированных функций  [21,22]. Характерными примерами уравнений
линейной регрессии (2.30) служат циклические
[21,22]. Характерными примерами уравнений
линейной регрессии (2.30) служат циклические  или полиномиальные
или полиномиальные  модели. В этом случае основной
проблемой статистического синтеза является построение оценок параметров модели
модели. В этом случае основной
проблемой статистического синтеза является построение оценок параметров модели  по наблюдениям
по наблюдениям  . Формально объединяя
коэффициенты (2.30) в один векторный параметр
. Формально объединяя
коэффициенты (2.30) в один векторный параметр  , приходим к уже рассмотренной задаче
нахождения оптимальных байесовских оценок. Например, для полиномиальной модели
второго порядка
, приходим к уже рассмотренной задаче
нахождения оптимальных байесовских оценок. Например, для полиномиальной модели
второго порядка
 (2.31)
(2.31)
оценке на основе наблюдений  подлежат три коэффициента
подлежат три коэффициента  и
и  или векторный параметр
или векторный параметр  . Структура оптимальных
алгоритмов оценивания и свойства оценок коэффициентов (2.30) детально
исследованы и составляют предмет линейного регрессионного анализа [21,22].
. Структура оптимальных
алгоритмов оценивания и свойства оценок коэффициентов (2.30) детально
исследованы и составляют предмет линейного регрессионного анализа [21,22].
Другим способом представления изменяющихся параметров
являются случайные последовательности (СП). Как уже отмечалось в п.1.5, весьма
представительным классом СП, имеющим удобное математическое описание, являются
марковские СП. Применение моделей векторных марковских СП во многих задачах
позволяет учитывать известную информацию о детерминированных составляющих
процесса изменения параметров. Например, можно значительно расширить класс
моделей (2.31), если воспользоваться следующей системой разностных уравнений:
 . (2.32)
. (2.32)
Решение этой системы совпадает с (2.31), если все случайные величины
(СВ)  имеют
нулевую дисперсию, а параметр (коэффициент корреляции)
имеют
нулевую дисперсию, а параметр (коэффициент корреляции)  . Объединяя изменяющиеся
параметры
. Объединяя изменяющиеся
параметры  и
и  в один вектор
в один вектор  , получаем
представление системы (2.32) в виде стохастического разностного уравнения (1.48):
, получаем
представление системы (2.32) в виде стохастического разностного уравнения (1.48):
 ,
,
где  ;
;  .
.
Отличием решений этого уравнения от (2.31) является представление
возможных траекторий изменения параметра совокупностью реализаций СП (2.32),
«концентрирующихся» для каждого конкретного набора параметров  «около»
детерминированной функции (2.31). Для иллюстрации на рис. 2.3 приведены два
семейства реализаций СП (2.32), соответствующих двум значениям дисперсии
«около»
детерминированной функции (2.31). Для иллюстрации на рис. 2.3 приведены два
семейства реализаций СП (2.32), соответствующих двум значениям дисперсии  параметра в установившемся режиме
и различным начальным условиям. На этих же рисунках пунктиром показаны решения
уравнения (2.31).
параметра в установившемся режиме
и различным начальным условиям. На этих же рисунках пунктиром показаны решения
уравнения (2.31).
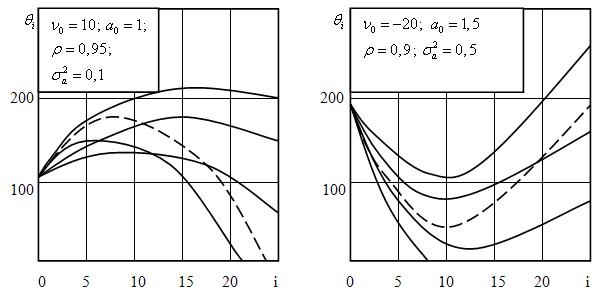
Рис.2.3.
Детерминированные функции (пунктир) и реализации случайных последовательностей
(сплошные линии)
